From May 13 to 17, 2024, the IEEE International Conference on Robotics and Automation (ICRA 2024) was held at the Pacifico Yokohama Conference Center in Japan. The conference, organized by the IEEE Robotics and Automation Society (RAS), is the largest and most influential flagship conference in the field of robotics.

ICRA 2024, Yokohama, Japan
The ICRA 2024 conference attracted over 7,000 scholars from around the world, featuring various academic activities including plenary sessions, keynote speeches, technical seminars, Robot EXPO, poster displays, and robot competitions. The conference covered cutting-edge fields in robotics such as humanoid robots, medical robots, human-robot interaction, robot learning, bionic robots, 3D reconstruction, and artificial intelligence, attracting 119 robotics companies including Boston Dynamics, KUKA, Franka Robotics, Honda Research Institute, and Unitree Robotics from China. ICRA 2024 received 3,937 articles from 58 countries, which were reviewed by 28 editors, 588 associate editors, and 6,719 reviewers, resulting in 1,765 papers being accepted, with an acceptance rate of only 44.83%.
Researcher Li Xiaojian, Associate Researcher Mo Hangjie, Dr. Xiao Xilin , Dr. Fang Jin, and Dr. Shi Yudong from the School of Management of Hefei University of Technology were invited to attend the conference. The team had two academic papers accepted, and their self-developed human-robot collaborative laparoscopic support robot system was also invited to participate in the ICRA EXPO exhibition.
The ICRA EXPO exhibition was a new addition to the ICRA conference, providing researchers the opportunity to demonstrate their robotic systems on-site and engage in discussions. A total of 81 different robots from 15 countries were selected for the exhibition. The human-robot collaborative laparoscopic support robot system presented by Researcher Li Xiaojian's team is a medical robotic system designed for minimally invasive surgery. This robot can assist the surgeon by holding the laparoscope during procedures, featuring innovative functions such as autonomous tracking of the surgical area, compliant dragging based on force-sensitive grips, wound point motion constraints, and adaptive micro-adjustments. It can autonomously adjust the laparoscope's field of view during surgery, providing the lead surgeon with a stable surgical view. During the demonstration of this robot, over a hundred robotics experts and scholars from around the globe visited and experienced the robot's performance, giving it high praise.

Group Photo of Researcher Li Xiaojian's Team
Human-Robot Collaborative Laparoscopic Support Robot System on Display at ICRA EXPO



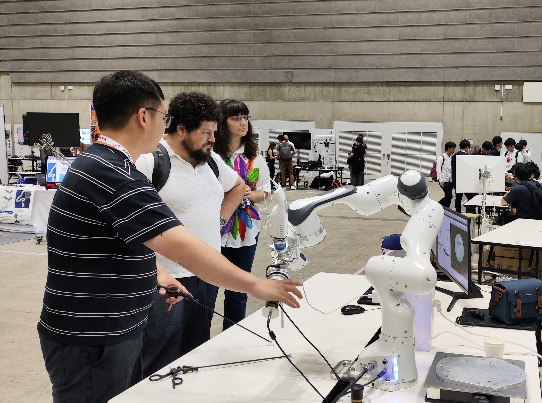
Domestic and International Experts Experience the Human-Robot Collaborative Laparoscopic Support Robot System
In addition to exhibiting their robot, Dr. Xiao Xilin and Dr. Fang Jin from Li Xiaojian 's team were also invited to give group academic reports. PhD student Xiao Xilin from class of 2019 in Management Science and Engineering presented his conference paper titled "An Integrated Position-Velocity-Force Method for Safety-enhanced Shared Control in Robot-assisted Surgical Cutting" at the “Motion Control” theme session. This paper proposes a human-robot shared control method that enhances safety through a motion fusion mechanism, allowing for a smooth switch between human-dominant and robot-dominant control, and designs a force feedback mechanism to improve safety. PhD student Fang Jin from class of 2022 in Management Science and Engineering presented his conference paper titled “A Force-driven and Vision-driven Hybrid Control Method of Autonomous Laparoscope-Holding Robot” at the “Medical Robots” theme session. This paper introduces a hybrid control method for laparoscope-holding robot systems that combines virtual torque generated from visual information with interaction torque obtained from force-sensitive grips, achieving guidance of the laparoscope's field of view under remote motion center constraints. Both presentations garnered significant attention from the attending experts, with multiple scholars posing questions during the sessions.

Xiao Xilin and Fang Jin Presenting at the Academic Report Sessions
Since its inception in 1984, the International Conference on Robotics and Automation (ICRA) has been held 41 times and is the premier international academic conference in the field of robotics and automation. It gathers researchers, engineers, and scientists from around the world to discuss the latest research findings and technological advancements, continually leading the development of cutting-edge fields in robotics.
(Written by Mo Hangjie, illustrated by various resource, Reviewed by Li Xiaojian)





